
標籤
astrophotography, C/2014 Q2 (Lovejoy), comet, 疊圖, DeepSkyStacker, 天文, 天文攝影, 彗星, 攝影, 洛夫喬伊彗星
繼一年多以前的C/2012 S1 (ISON)及C/2013 R1 (Lovejoy)兩顆肉眼可見的彗星之後,另一顆也由澳洲業餘天文學家Terry Lovejoy發現的彗星–C/2014 Q2也在近期達到約4~5等星的最高亮度。這顆彗星一路向北,目前位於金牛座白羊座,並且與昴宿星團最接近時只有8度左右,因此昨晚我就使用Canon 40D+50mm F/1.4標準鏡頭固定拍攝多張疊圖,把彗星和昴宿星團一起收進同一畫面之中啦!

左上:昴宿星團,右下:C/2014 Q2 (Lovejoy)彗星。
我玩天文攝影已經七年了,等於從買來40D之後就開始玩,因此特地在本文討論天文攝影疊圖的心得以及步驟。首先,為什麼要疊圖?星空很黑很黑,但現在的相機不都有長曝或夜景模式嗎?最明顯的答案,就是由於地球自轉,星星相對於地球是會移動的,儘管每小時只走15度左右,肉眼看不出來,但在望遠鏡放大的尺度下就動得很快了,所以長曝時會拉線而不清晰。
天文觀測時,也經常使用赤道儀或導星儀,自動轉動來抵銷地球自轉造成的影響,讓星點在望遠鏡的畫面中保持不動,如此一來也可以用長曝來得到較佳的影像。儘管如此,疊圖在天文攝影中依然非常重要,因為導星設備的誤差以及天空光害的背景光,會讓我們沒辦法把曝光時間無止盡地延長,這時候如果拍攝多張再疊合一起,就能使天體影像更加清晰。因為每張照片都有有用的訊號以及無用的噪點,藉由疊圖可讓訊號累積而噪訊抵銷,整體的訊噪比(s/n ratio,SNR)就提高了,也讓天體黯淡的特徵能夠顯現出來。理論上若噪訊完全隨機,疊合x張圖,訊噪比就會增加為x的平方根,也就是疊合25張就能讓訊噪比提高為5倍之多。
現在電腦運算的發達,讓就算沒有赤道儀、導星儀等昂貴導星設備的天文玩家,也能輕鬆用疊圖方式拍攝出不差的天文照片。本文所介紹的是個人非常推薦的免費天文疊圖軟體–DeepSkyStacker(以下簡稱DSS)。首先大家可把它開起來看看,左邊是疊圖流程的功能表,右上是照片預覽編輯區、右下是檔案清單區。
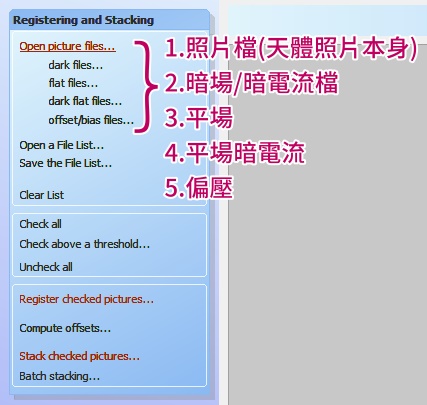
從左上角開始看起,第一個疑問可能是:開啟照片的檔案有這麼多種?這些是什麼?我以為只要拍一堆一樣的星星照片就好了。其實最基本而言的確是這樣,但若額外拍攝一些校正用的照片,疊圖的效果會改善很多。以下就簡單介紹這每一類照片是什麼、要如何拍攝:
- Picture files:就是星空或天體本身的照片。
拍攝時,把相機穩定架在三腳架(固定攝影法)或導星設備(追蹤攝影)上,將鏡頭或望遠鏡準確對焦。若鏡頭為自動對焦鏡頭而且準焦,可用自動對焦(AF)功能對遠處亮物(大樓、燈塔、月亮、金星、天狼星…)自動對焦,並且對星空試拍,確認照片準確對焦。通常自動對焦完畢後還得用手動精細調整。若完全使用手動對焦,則將對焦環轉到無限遠(∞)刻度,若無刻度就轉到底再往回轉一點,從這一點開始微調。調整完畢後將自動對焦的鏡頭切換成手動對焦。若相機或鏡頭有防手震功能,拍攝前務必將防手震關閉。
將相機的感光度ISO設定在最高的"可用ISO",亦即不是延伸出的H、H1、H2之類設定即可。一開始可先用光圈先決模式,將鏡頭最大光圈略縮一格左右(若最大光圈F/4,則縮至F/5.6),或不超過F/8.0,解像度較高,並讓相機自動決定快門曝光時間。之後即可切換為手動模式,將光圈與快門數值輸入。快門可以比稍早相機自動決定的再慢一倍,以收集更多的光線。
使用固定攝影法的,需要特別注意曝光時間:由於星星會動,曝光時間不能過久,以免拍攝出的星點拉線。一般而言200-300mm焦距的鏡頭,曝光超過1秒就會拉線了!這時就要以避免拉線為重,犧牲一部分的曝光量了。因為拉線無法藉由疊圖修正。相反地,若在光害極少之處(如高山)使用追蹤攝影法,適當的曝光時間往往超過30秒,這時就需要使用手動模式中的B(bulb)快門,以快門線來控制曝光時間了。
相機拍攝設定完畢後,即可開始尋找欲拍攝的目標。如果目標肉眼不可見,便需要用相機尋找,畢竟相機由於可以長曝,感光度比人眼強大很多。鏡頭屬於變焦鏡者,可先用廣角端尋找,將目標大致置於畫面中央之後拉近至望遠端或合適的焦距。若打算用定焦望遠鏡頭拍攝,不妨多攜帶一顆標準鏡頭,用標準鏡頭找到並對準目標後再換上望遠鏡頭。
對準目標後即可用連拍模式拍攝。快門線是必備器材,一來可以固定按住快門,這樣拍攝過程中可以稍微離開相機喝熱咖啡、看連續劇、玩candy crush…等等,二來較高檔的快門線有定時收放功能,在使用B快門拍攝的情況下比較方便。
若使用固定攝影,別忘了我先前說星星會動,所以每拍一段時間要檢查目標是否偏離中心太多。以我個人經驗,拍攝天球赤道附近(移動最快)的目標,若使用200-300mm焦距,建議每拍5分鐘檢查一次。盡量在目標跑到畫面太邊緣之前就重新定位,因為鏡頭邊緣的解像度通常較差。如果認得出方位,就應該知道目標往哪邊跑(東升西落),下次定位時可以不把目標定在正中間,而定在移動方向的另一邊,可以節省重新定位的次數。總共拍攝張數當然是越多越好,唯一的限制就是記憶卡、電池、天氣/月光、以及個人的無聊程度了~ - Dark files(暗場或暗電流):數位相機長時間曝光時,感光元件會因為發熱而產生電流,進而造成雜訊。拍攝暗場的目的,就是抵銷這種雜訊。由於暗電流雜訊的多寡,與曝光時間和感光元件的溫度有很大的關係,我們必須使用與拍攝星空照片完全相同的設定來拍攝。最簡單的辦法,就是星空拍完之後,相機留在原處,不要收回車上或室內,以保持相同溫度。只要用鏡頭蓋把鏡頭蓋起,不動相機任何設定,直接再繼續連拍即可。
- Flat files(平場):一般鏡頭都有周邊減光(vignetting)的現象,尤其當光圈較大時更為嚴重。周邊減光會讓照片的亮度不均勻,增添後製的困難。平場就是只有周邊減光資訊的照片,因此拍攝平場能讓軟體將周邊減光抵銷。既然知道了平場的目的,就不難了解要如何拍攝。最簡單的辦法是拿一件沒有圖案的白衣服,平整包覆在鏡頭前端,然後拍攝亮度均勻的地方,例如晴朗無雲(或完全被雲霧覆蓋當然也行)的天空,或者被燈光/日光平均照亮的純色牆壁(最好是白色)。拍攝平場時必須使用與拍攝星空照片相同的焦距、對焦距離和光圈。對焦距離不必完全相同,但至少要接近,所以對焦就不用仔細對了,直接對遠景自動對焦或轉到無限遠即可。感光度也建議設成與星空照片使用的一樣,快門就讓相機自動決定(使用光圈先決模式)之後,轉到手動模式固定快門即可。
- Dark flat files(平場暗電流):既然拍攝星空會產生暗電流,拍攝平場當然也會有。將相機維持拍攝平場一樣的設定(包括溫度),把鏡頭蓋起來拍即可。
- Offset/bias files(偏壓):數位相機每曝光一幅照片後,需要電流來讀取感光元件上的資訊,這個電流也會造成雜訊!這就是偏壓,因此我們要拍攝只有偏壓的照片來抵銷它。最簡單的方式,就是把鏡頭蓋上,使用與拍攝星空照片相同的感光度,用手動模式把快門調到最快(如1/8000)之後連拍即可。焦距、光圈、溫度什麼的通通不重要。
以上的照片強烈建議全部拍攝成raw檔,因為raw檔等於數位底片,比JPEG含有更多資訊,而且使用的是無損壓縮。儘管占用記憶卡空間較大,但絕對值得。
至於2~5這些校正用的照片要各拍幾張呢?有些人有錯誤的概念認為只拍一張即可,但別忘了,儘管這些都是所謂的"系統性誤差",本身還是會受到"隨機誤差"的影響,因此多拍幾張做平均是多多益善,一般而言至少各拍20張左右就足夠了。以下簡單用表格整理拍攝各類照片的設定:

(備註:許多變焦鏡頭因為變焦阻尼不足,鏡頭俯仰角度過大時,會因自身重量自動伸縮,在攝影界中俗稱"垂頭"。防止垂頭相當簡單,只要使用矽膠運動手環套上鏡頭,使其一半套在變焦環、一半套在鏡身上,便能有效增加阻尼,相當好用!)
花了一整個晚上(也可能只有20分鐘)拍攝一大堆的照片,接下來的事情就要交給電腦了。首先開啟DeepSkyStacker,將light、dark、flat、dark flat、offset照片依序開啟。直接使用raw檔就可以了,DSS支援所有主流相機的raw格式,若你的相機實在太新或太冷門,連最新版的DSS也沒轍,還有一條退路,就是使用相機公司的轉檔軟體(或Photoshop等,如果讀得懂),把raw檔批次轉換成16位元的TIFF檔。千萬不要又轉成JPEG了。轉換前也可適當調整白平衡、曝光度、飽和度等,只要確認所有raw檔都套用相同的設定來轉檔即可。另外,一般轉檔軟體都有銳化設定,建議將銳化調到最低或取消掉,因為銳化是利用數學運算來增強影像中物體邊緣的清晰度,不僅沒有增加訊噪比的效果,還會造成失真,對疊圖應用相當不利。還有一種情況需要轉換成TIFF檔,稍後會提到。
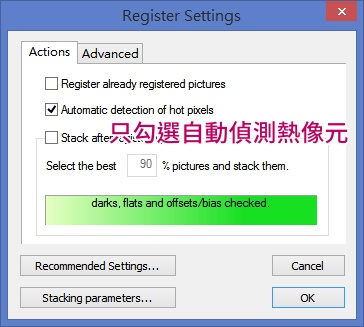
之後勾選全部的星空照片,第一個步驟便是偵測星點。

雖然軟體可以將整個過程幾乎完全自動化,但我習慣把步驟逐步進行,如此可以微調各步驟的設定,若運算中途當機,也不須從頭再來。因此點選偵測星點後出現的第一個分頁,只勾選自動偵測熱像元,取消勾選偵測星點後自動疊合。所謂的熱像元(hot pixels)就是我先前說過的,感光元件由於長曝發熱在某些像素上形成的噪點,也就是暗電流的一部分,軟體可以自動偵測並排除這些,以免當成星點來計算位移的話造成誤差。
接下來進入進階設定分頁。DSS的基本原理是偵測每張照片的星點之後,建立星點之間的相對位置,再用數學計算將每張照片的星點對齊。因此必須確保有足夠的星點使運算準確。首先調整偵測星點的臨界值,再勾選中位數濾波,可進一步減少將雜點誤判為星點的機率。接著按計算星點數,DSS就會讀一張照片出來試算看看。星點最好在100顆以上,如果臨界值調到最低,依然無法得到滿意的星點數量,表示你的raw檔可能曝光不足/太暗,或者拍攝的天區剛好沒有太多亮星。這時候請不要灰心,把raw檔用轉檔程式開啟,調整曝光度與對比後,套用在所有的raw檔上並全部轉成16位元TIFF檔,再回到DSS把各類TIFF檔依次開啟即可。此種做法通常可讓偵測到的星點數大大增加,因此臨界值也可調高不少。
另外,若發生上述的情形,建議先別勾選全部的星空照片,先勾個5~10張左右來偵測星點即可,如此可以用最少的時間預覽偵測星點後計算出的位移量,來判斷臨界值是否合理(詳見後述)。

偵測星點和疊合是DSS疊圖最花時間的兩個步驟,依照片數的多寡,可以花數分鐘到一個小時。若DSS偵測星點跑到一半就當機(其實還滿常發生),也不必擔心,因為每偵測完一張照片的星點後,會自動將星點資訊儲存在一個純文字檔中,下次重新開啟DSS偵測星點時,這些已經有資訊的照片會自動跳過。全部偵測完畢後即可計算位移量,這通常不用多久,幾秒鐘到幾分鐘就好了。

算完後檔案清單冒出了位移與旋轉角度,這時請把檔案清單照檔名或拍攝時間排序,看看位移與旋轉角度是否合理。若使用固定攝影,照理來說星星的移動方向是不變的,所以位移和旋轉角度應該隨著拍攝時間的增加而平滑地改變(增加或減少都有可能)。如果這些數字不合理,例如每張位移都幾乎不變,或者忽大忽小、跳來跳去的,就表示是偵測星點的步驟出了問題,極可能是星點過少或偵測到太多雜點了。這時候就得重新改變臨界值偵測星點,然後重新計算位移量了。一般而言若使用raw檔疊圖且星點數在100-500顆之間,這種情況發生的機率相當低。如果對照片的品質不放心,隨時可以先勾選少數幾張星空照片偵測星點並計算位移量,等確認沒問題後再勾選全部,以節省優化的時間。
除了星點數量、位移與旋轉角度外,其他值得注意的欄位包括分數/評分,也就是照片整體品質的指標,分數越高的照片所含的星點資訊就越多。FWHM則是星點半高寬的平均,簡單來講就是星點有多大顆,單位是像素,所以當然是越低越好,表示星點越銳利。一般而言FWHM在4以下就不錯了,而因為數位相機感光元件Bayer矩陣的設計,幾乎不可能低於2。若超過5就表示星點過於肥大,有以下幾種可能:第一,鏡頭沒有準確對焦。第二,拍攝時相機不穩,例如使用的腳架和雲台承重力不足,或者拍攝時有強風。第三,拍攝環境的視寧度不佳,以致星點肥大。視寧度不佳的原因有:強風或強烈溫差造成的大氣擾動、天空有薄雲/霧/靄/霾,或者懸浮微粒汙染物過高。一般而言,在光害較低的山區或海邊,汙染物的問題較小,拍攝時的天氣若濕度低、風力微弱,也對視寧度有所幫助。

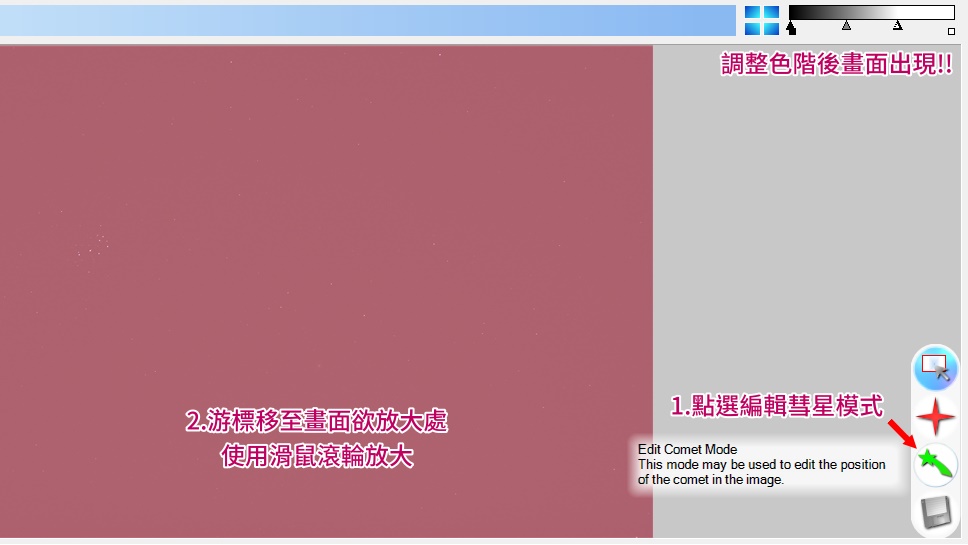
偵測星點以及位移的部分都沒問題之後,既然我們要疊的是彗星,而彗星相對於恆星會移動,所以必須進行以下額外的步驟。若是一般星空疊圖則可跳過。首先將星空照片按拍攝時間或檔名排列,點選第一張照片。上面會出現預覽圖,如果是raw的話通常會一片黑,完全沒有畫面。這可不是因為軟體的bug或國防布喔!而是raw檔的動態範圍很大,一般螢幕的顯色範圍只有8位元,自然無法忠實呈現raw檔中所有的色階。這時只要把右上角色階條的灰色和白色三角形往左適當調整,畫面就會出現了。

畫面出現後可能會偏色,尤其在有光害之處拍攝的照片會偏紅或黃,這是正常現象不必緊張。因為這只是預覽用的照片,色階無法將RGB三色分開調整;而最終疊合成果可以輕易調整白平衡。接著點選右下的編輯彗星模式,在畫面中若彗星太小顆,可將游標移到畫面上用滑鼠滾輪放大。
如果彗星足夠明顯,DSS會自動用中間有十字的圓圈圈出,這時只要把游標移到圈圈附近,讓圈圈亮起來之後點選,就可以自動點選出彗星位置。如果無法自動偵測彗星,只要按住鍵盤的shift鍵後就能自由點選,這時就必須點精準一點;左上角會出現游標附近的放大圖,盡量點在彗星中央最亮的地方。點完之後點到下一張照片,第一張照片中的彗星就儲存了,星點數的數字後面會出現+(C)表示彗星。
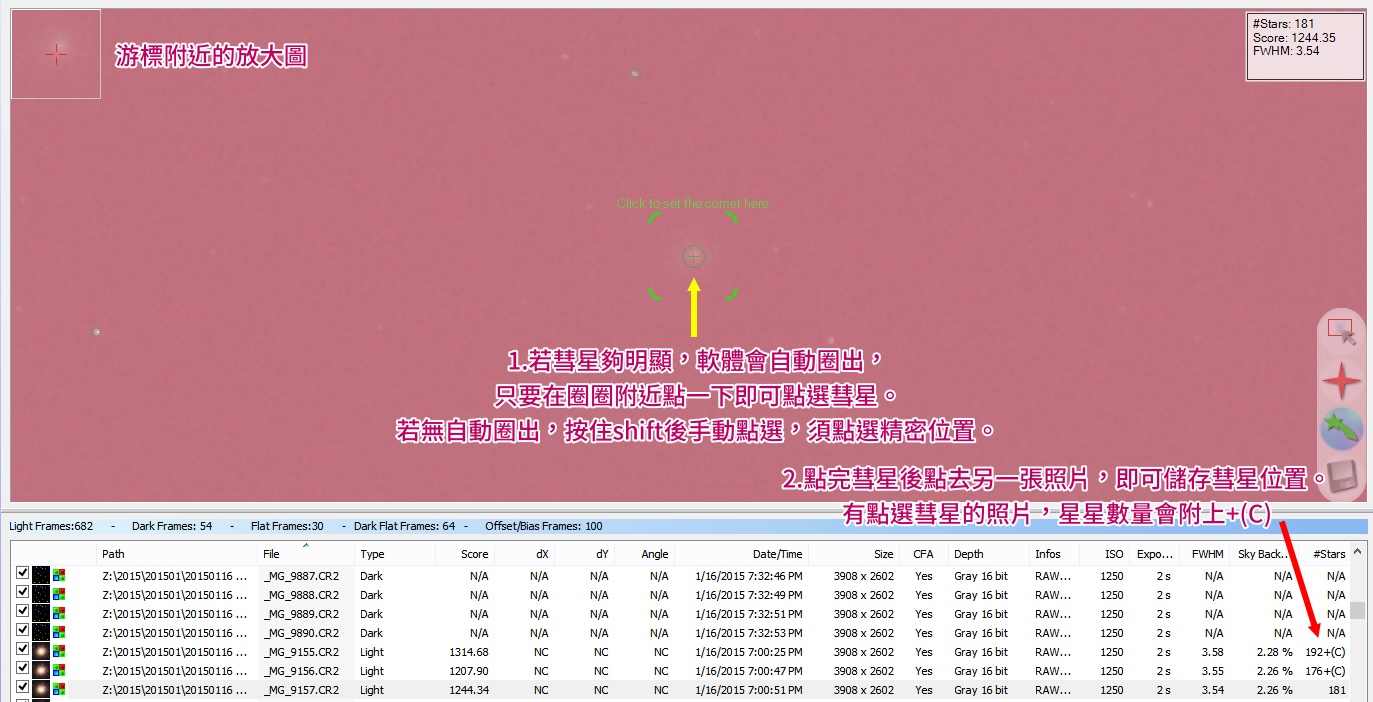
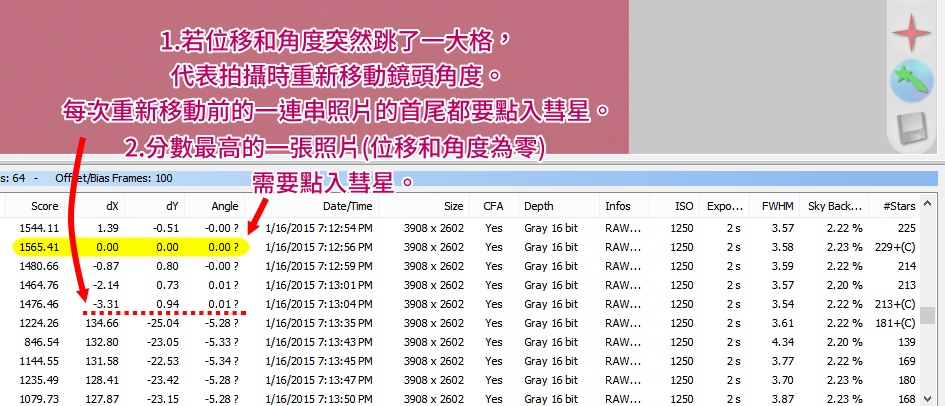
彗星要每張都點嗎?舊版的DSS中真的要這麼麻煩,拍了一百張就要點一百張,非常費時無聊;幸好新版中已經不必這樣做了,因為軟體會自動讀取相片拍攝時間,來內插出彗星的正確位置。如果拍攝的過程中,相機的角度有重新定位過,這可以從位移和旋轉角度的不連續性來看出。每次相機拍攝角度不變的那一串照片中的首尾兩張,都要點入彗星。每重新定位一次,之後那一串照片的首尾兩張也要點入彗星。最後,所有照片中分數最高的那一張(可以點選分數欄,將照片以分數排序以找出;最高分的那張會被自動當作參考畫面,所以位移和旋轉角都是0)也要點入彗星。這些照片是最少一定要點入彗星的,DSS才有辦法正確疊合,至於其他照片就可點可不點。
點選完所有彗星之後,重新檢查分數最高的照片是否還是保持同一張。因為有時候DSS會把彗星也偵測為恆星,這樣若點入彗星之後,星星就少一顆了,分數也會改變。如果冠軍換人坐,就要再把新的衛冕者拿出來點彗星才行。
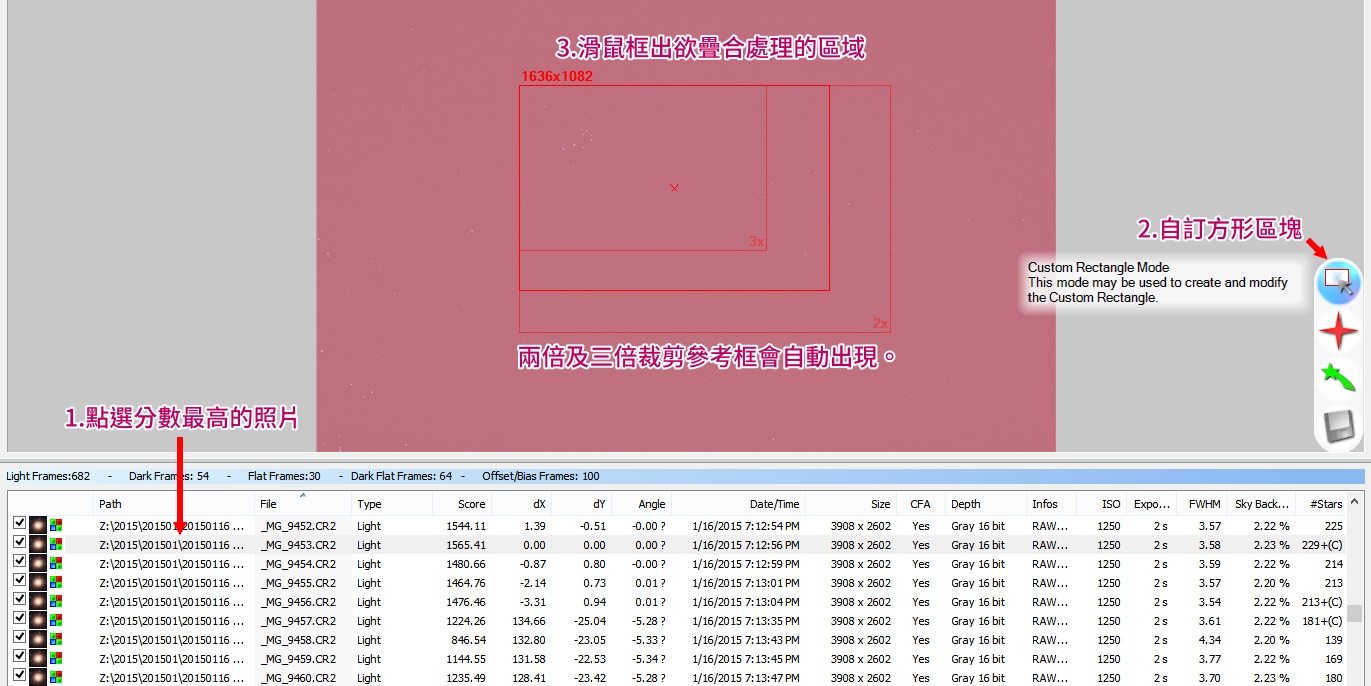
疊合前最後一件事,就是若拍攝時使用的鏡頭焦距不足,或者拍攝畫面中只有一小部分是有興趣的,這時可以點選分數最高的照片(也就是參考畫面),點選右邊的自訂方形區塊模式,然後在畫面中手動框出DSS要疊合的部分,這樣疊合時可以只處理這一塊,可節省不少記憶體與運算時間。以下可看到我拉出把昴宿星團跟彗星框起來的一塊:
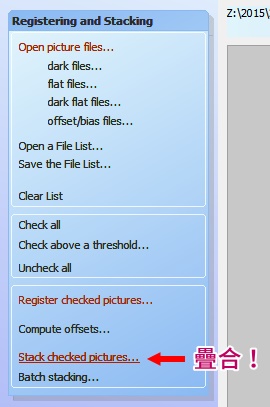
接下來就是疊合時間啦!注意我是勾選了全部的照片來進行疊合;若照片先前有偵測星點或位移量的問題,可能有些照片品質較差或者根本無法算出位移量的,就不建議全部勾選,可選擇"Check above a threshold"只勾選一定臨界值以上的照片來疊合。
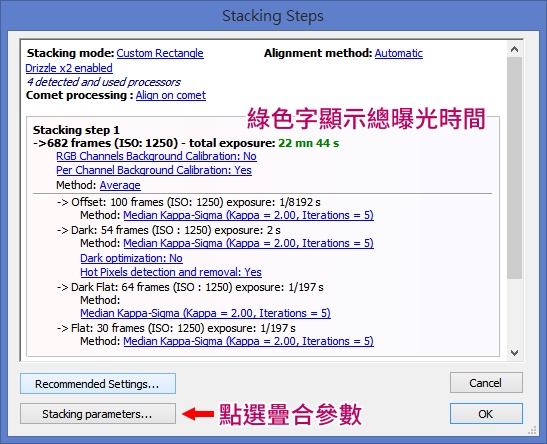
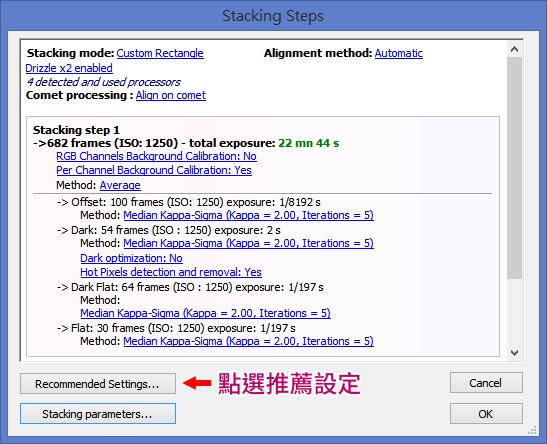
按下疊合後會跳出確認視窗,首先可注意綠色字是疊合使用照片的總曝光時間,一般而言越長就能帶來越高的訊噪比。以C/2014 Q2彗星而言,我看了網路上的一些照片,至少要有十幾分鐘,彗尾才會明顯。我這一疊有將近23分鐘,所以疊出彗尾應該沒問題!首先選擇左下角的疊合參數:
若剛剛有畫自訂方形區域的話,就會使用自訂方形區域,否則建議使用交疊模式Intersection Mode,這只會處理每張照片共同重疊的區域,可以確保最終照片中的每個像素都是所有用來疊合的照片平均出來的,整個畫面的訊噪比才會平均。
Enable 2x (3x) Drizzle則是內插放大兩倍或三倍的意思,可以增加照片的解析度。原理是每張照片之間都有些許的位移,而DSS偵測位移的精度超過一個像素,所以如果有多張照片疊合,就可以利用各照片相對的位移,計算出更高的解析度來。注意兩倍內插要消耗4倍的記憶體;三倍內插就是9倍。所以建議搭配自訂方形區域使用。我因為用的鏡頭就只有50mm,加上已經框了中間一小部分來疊合了,於是選擇兩倍內插。最後,暫存檔資料夾要選擇硬碟空間足夠的地方。

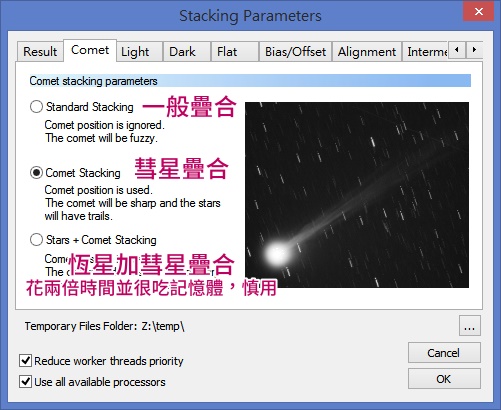
因為疊合彗星,所以移到彗星分頁來做進一步設定。DSS的疊合模式有三種:一般疊合只取恆星位置,若彗星顯著移動就會糊掉。彗星疊合只取彗星位置,若彗星顯著移動,彗星仍會清晰,反而是恆星會拉線。最後是恆星加彗星疊合,是先取彗星位置疊一遍,再取恆星位置疊一遍,最後把彗星從第一張挖出來,貼回第二張之中,以取得恆星和彗星都清楚的影像。這個很吃記憶體而且對於緩慢移動的彗星而言,效果不太好,又容易當機,建議慎用。(假如這個視窗中沒有彗星分頁,表示一定有幾張該點入彗星的照片漏了點,這時只要取消後檢查照片的第一張、最後一張、以及分數最高那張,通常能找出問題)
設定妥當後回到疊合步驟視窗,這次點選推薦設定,看看是否所有設定都是建議設定。
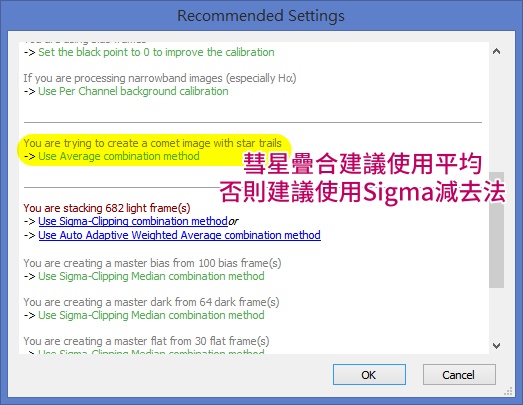
這時會跳出一個新的視窗,裡面有許多項目,如果這個項目符合你的拍攝條件,就把它下面的設定點成綠色即可。這裡只有一個地方需要特別注意,就是彗星疊合的模式,如果使用一般疊合或恆星加彗星疊合,用Sigma減去法是最好的;如果使用彗星疊合,則使用平均法。
回到疊合步驟視窗,最底下會顯示需要多少硬碟空間,確認空間足夠後按OK即可疊合。疊圖過程中硬碟會非常忙碌,所以我個人習慣把所有照片和暫存檔資料夾都放在非系統硬碟的外接硬碟上,這樣疊合過程中可用電腦做別的事情而不會卡卡的。依照疊合的照片數量,疊圖可花上數分鐘到數小時不等。若疊合成功,最後右邊的畫面會整個換過,像是下面這樣:
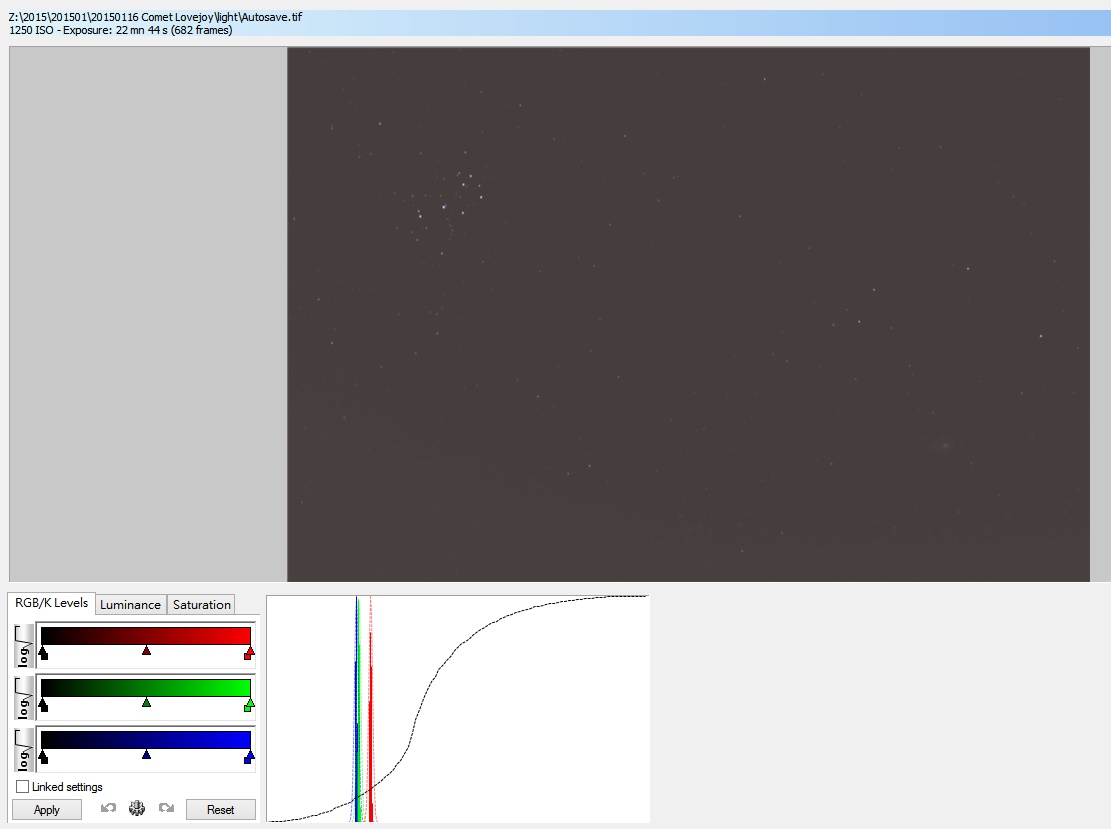
上面是最終疊出的照片,下面是色階調整。我以前較常在這裡做調整,但現在多使用Photoshop來後製(詳細後製過程可見下篇),所以不用理這個畫面,直接把DSS關了即可。關閉前會跳出對話方塊詢問是否儲存檔案清單。建議選是,將檔案清單存為純文字檔。如此一來若後製過程中對疊合成果不甚滿意,想要修改設定,可以重新開啟DSS後直接開啟檔案清單,就不用閒工夫手動把星空照片、暗電流、平場什麼的再一一讀出來。
關於DSS疊合後的圖片要如何後製,詳見下篇。

引用通告: C/2014 Q2 (Lovejoy) 彗星:後製與調整 | evelyn in wonderland